O termo “háptico” surgiu para designar a ciência do tato, dedicada a estudar e simular pressão, textura, vibração e outras sensações biológicas relacionadas. Dessa ciência surgiram múltiplas inovações que visam dar mais realismo e profundidade no controle de videogames, manches de avião que vibram ou ficam mais difíceis de puxar em caso de desequilíbrio durante o voo e em celulares que vibram em determinadas situações. O estudo de interfaces hápticas é um campo de pesquisa relativamente novo e que está crescendo rapidamente.
O conhecimento adquirido nesse campo foi obtido por meio da colaboração multidisciplinar, onde inúmeras tecnologias, como realidade virtual, impressoras 3D e, mais recentemente, dispositivos hápticos 3D.
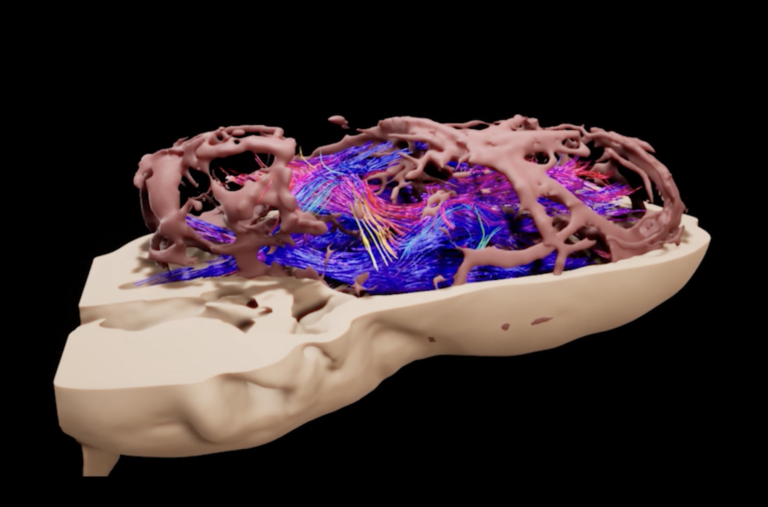
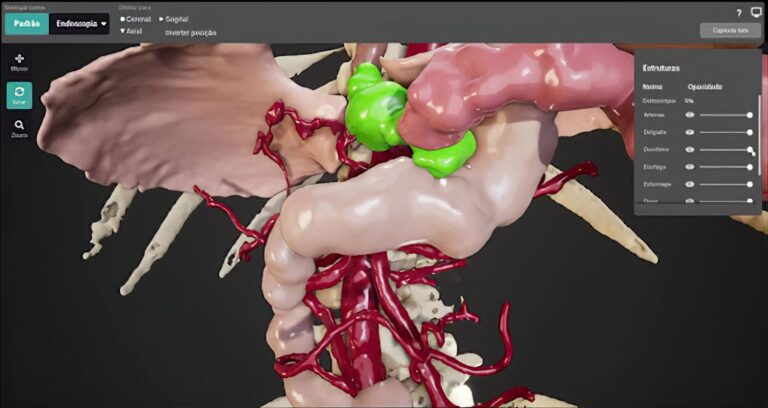
A etapa inicial consistiu na segmentação de imagens de ultrassonografia (US) de casos reais. Esse processo permitiu a criação de modelos tridimensionais (3D) detalhados, garantindo a fidelidade dos tecidos e órgãos simulados. Para isso, foram utilizados “software” de segmentação e reconstrução 3D, que converteram imagens 2D em modelos compatíveis com o Unity.
Para possibilitar movimentações realistas dos tecidos e órgãos, foi realizado o “rigging” dos modelos 3D. Esse processo envolveu a criação de estruturas internas para articulação e deformação, utilizando:
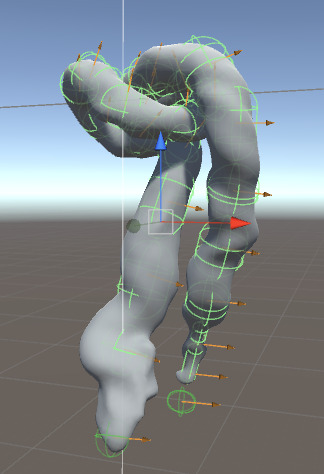
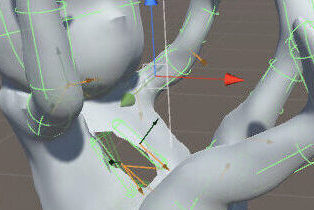
- Ossos: Definem os pontos de articulação e os movimentos internos do modelo.
- Pesos de Influência: Controlam o grau de deformação de cada área em resposta às articulações.
Essa técnica foi essencial para garantir interações táteis precisas, permitindo manipulação e reposicionamento de tecidos sem comportamentos artificiais.
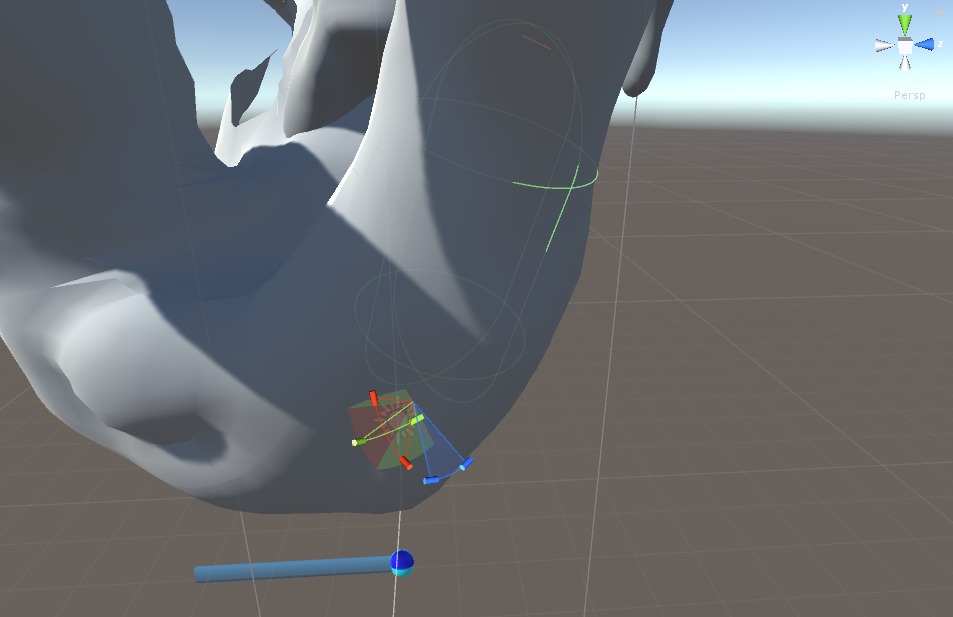
Foram utilizados os componentes “Configurable Joint” e “Hinge Joint” do Unity para configurar os graus de liberdade das partes móveis do modelo, garantindo maior realismo anatômico. As principais configurações incluíram:
- Restrições de Rotação: Limitação dos ângulos nos eixos X, Y e Z para evitar posturas não naturais.
- Movimentação Controlada: Prevenção de deslocamentos irreais, como a hiperextensão do cordão umbilical.
- Interações Físicas: Ajuste das respostas ao toque para simular reações naturais, como o deslocamento de tecidos ao serem pressionados.
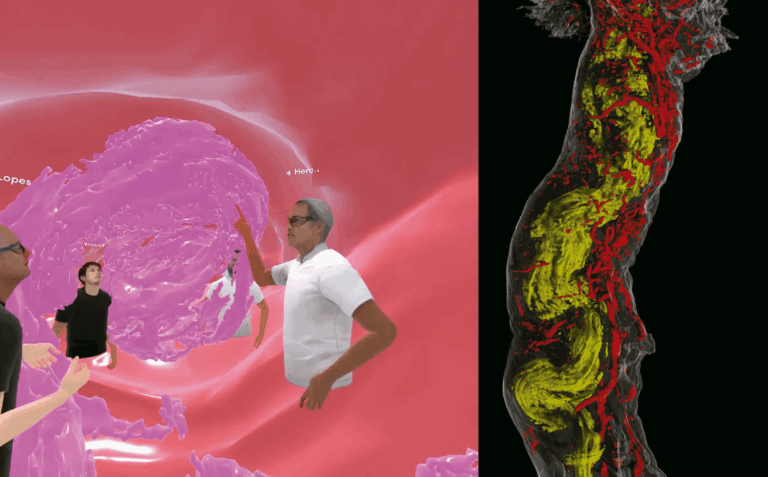
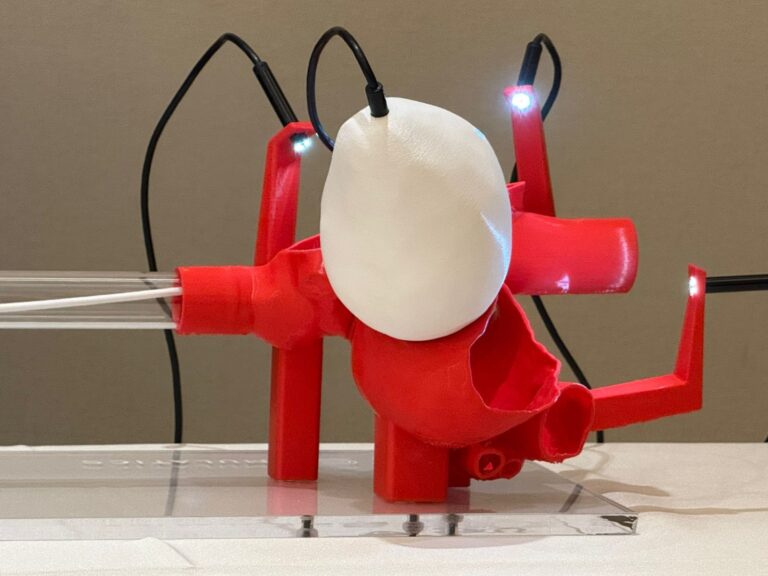
A simulação foi integrada ao dispositivo “Touch” da 3D Systems por meio da biblioteca “OpenHaptics”, permitindo feedback tátil ao usuário. O dispositivo fornece forças lineares nos eixos X, Y e Z, mas não suporta torques (forças rotacionais). Para contornar essa limitação:
- As rotações foram convertidas em forças lineares ajustadas.
- O sistema foi configurado para simular resistência e peso ao manipular tecidos e órgãos, criando uma experiência tátil mais realista.

Durante o desenvolvimento da simulação háptica, surgiram desafios técnicos, como a ausência de feedback de torque do dispositivo háptico, exigindo adaptações para evitar deformações excessivas e manter a estabilidade das interações. Além disso, a sincronização dinâmica de superfícies táteis em tempo real foi um processo complexo, pois era fundamental garantir que as superfícies fossem criadas e atualizadas com precisão durante a simulação. Outro desafio foi o ajuste dos parâmetros de movimentação para respeitar as limitações anatômicas sem comprometer a funcionalidade do sistema.
Os resultados técnicos demonstram a eficácia da abordagem utilizada. A simulação tátil reproduziu com precisão a sensação de peso e resistência ao toque, aspectos essenciais para o treinamento médico realista. A configuração de “rigging” e juntas garantiu movimentações naturais e coerentes, permitindo interações fluidas, como reposicionar tecidos ou manipular o cordão umbilical. Além disso, o sistema demonstrou flexibilidade ao possibilitar a criação e manipulação de superfícies táteis durante a execução, ampliando sua aplicabilidade para diferentes cenários cirúrgicos e necessidades de treinamento.
Nós acreditamos no uso destes dispositivos para treinamento médico.
Referências
WERNER H, TONNI G, LOPES J. 3D Physical and Virtual Models in Fetal Medicine. Applications and Procedures. Springer, 2023.